

Alice OSE (Open Source) Exoskeleton Model
<< Low-cost, easy to build, and … 100% Open Source.
… [it] will have applications in rehabilitation, human augmentation, and even gaming.
…anyone else who develops something on this platform will always be improving it … thanks to the nature of Open Source hardware. >>
Bryan Cockfield
The Hackaday Prize by Hackaday.io. 2017
Alice Exoskeleton by INDI @ Hackaday Prize, US. August 2017.

Alice Exoskeleton by INDI @ CYTED, Spain. November 2018.
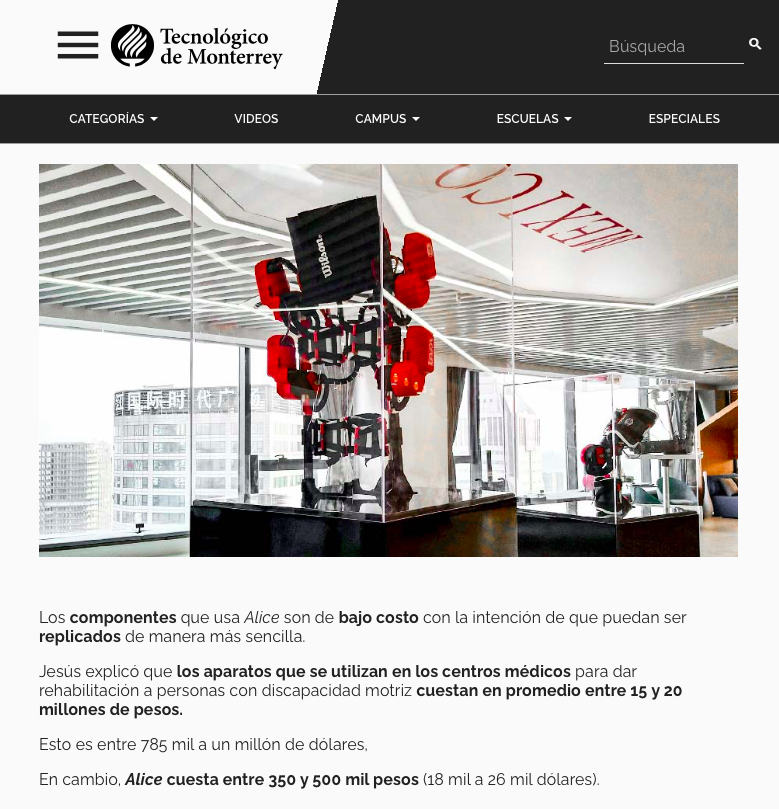
Alice Exoskeleton by INDI @ Hangzhou, China. April 2019.
The Robot
Arguably the first Child-Focused and Open Source Lower-Limb Exoskeleton, Alice is proudly developed by our team in France and México, for the world.

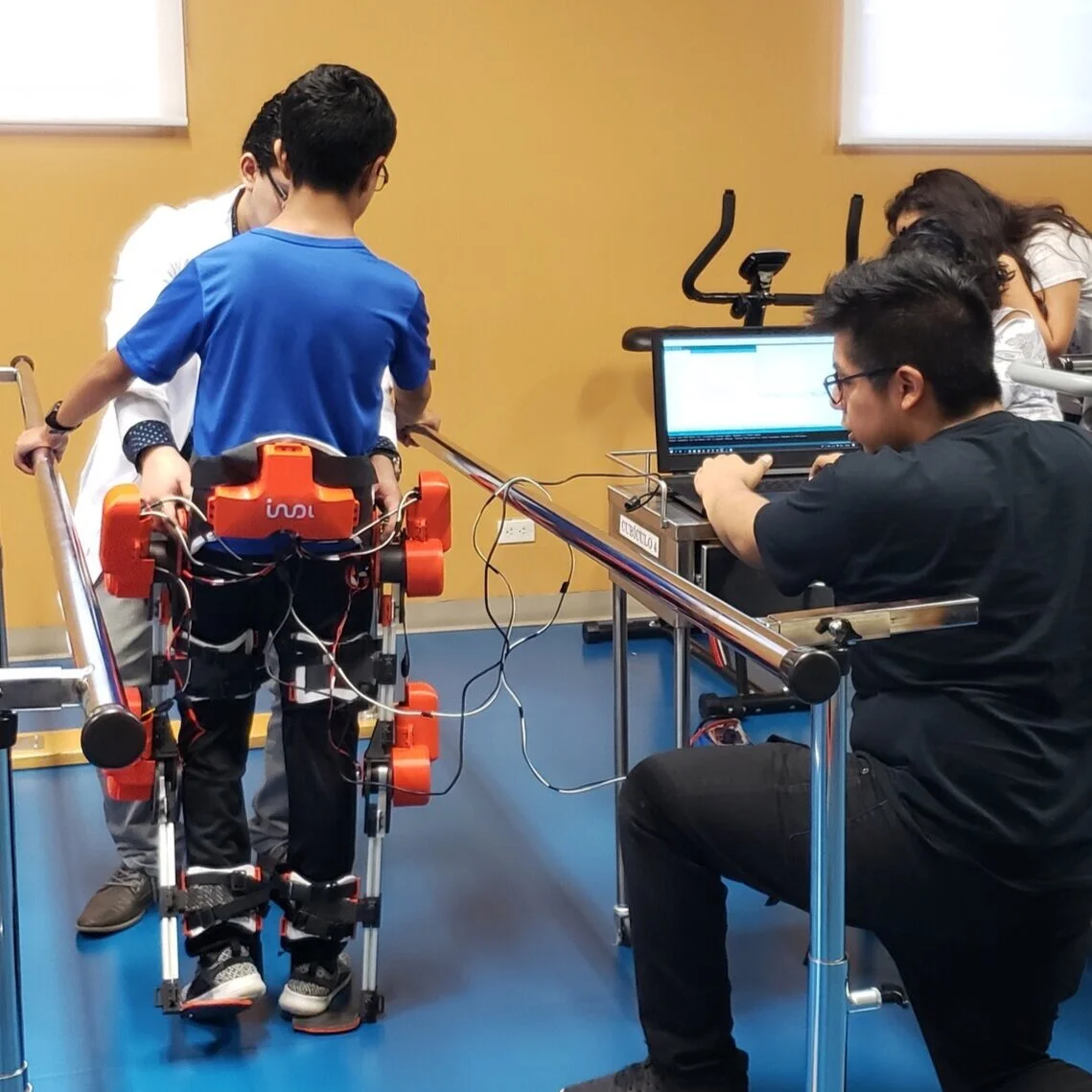
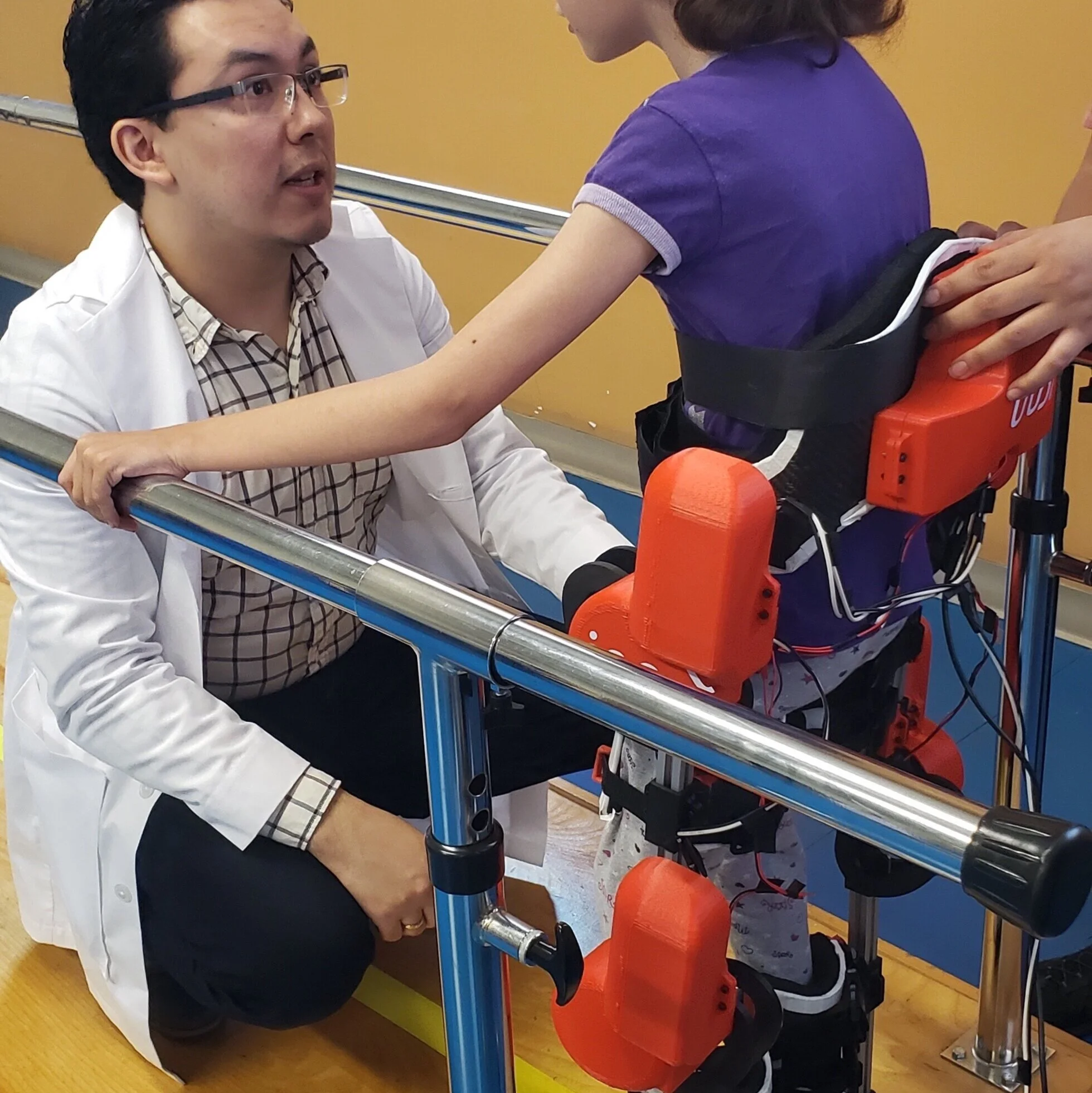
Alice Open Source Exoskeleton by INDI (January 2019). The shown prototype was tested and validated with 10 pediatric patients in Monterrey, México. January 2019.
Originally designed in 2016 (Monterrey, México) after years of work and approximately $60,000.00 USD invested by private and public partners, Alice is now available for use by anyone under the Attribution Non-Commercial CC License (CC BY-NC). This patient-validated platform is openly shared following a strong conviction for creating inclusive technology which pushes current boundaries while ensuring access to the public.
Alice addresses manufacturing, material and cost restrictions specifically encountered in Latin America and other developing countries, promoting successful exoskeleton deployment within budget-restricted communities.
This exoskeleton additionally includes a specialized combination of hardware, software and operation conditions focused on reducing complexity while achieving the minimum required functionality for previously-unattended patients.
Mechanics:
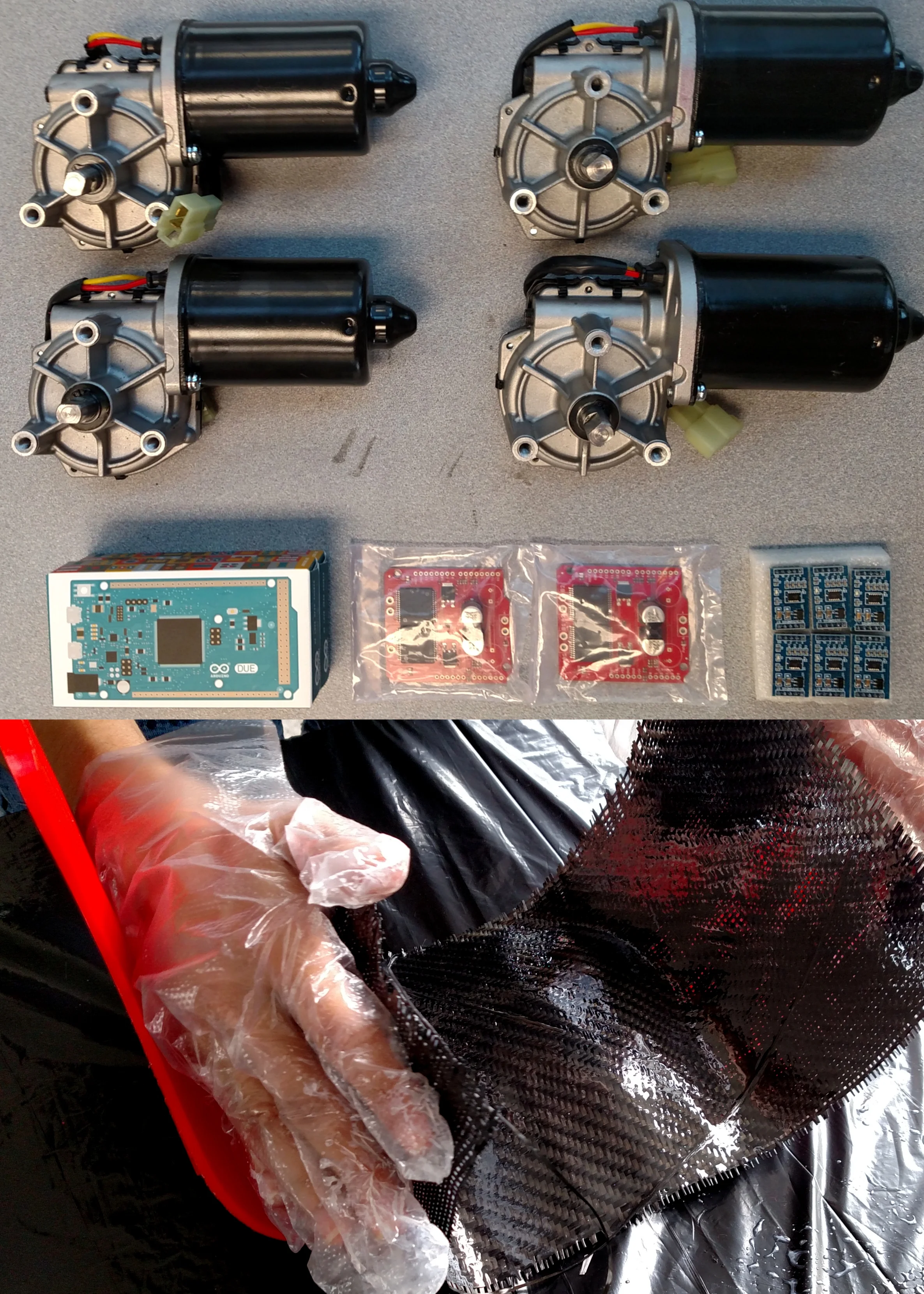
The system features only 4 DOFs powered by automotive DC 26Nm actuators as well as a significant portion of parts manufactured on PLA and commercial 3D-Printing composites.
Programming:
Motion is achieved through simplified PID controllers designed and implemented over low-cost electronics and in conjunction with non-specialized actuators + basic potentiometer-based feedback. Controllers are designed to counter actuator nonlinearities through customized filtering, anti-windup algorithms, and static friction compensations.
Operation Layout:
Alice operates using a decentralized layout where the power source and system operation modules are separated from the exoskeleton. Standard automotive 12V Lithium / Lead batteries and a PC or Mac running Arduino IDE are enough to successfully operate the exoskeleton in safety-compliant clinical contexts.
Patents:
1. (2019, China) CN201930193288.2 Electromechanical Structure for Pediatric Mobility.
2. (2019, México) MX/f/2019/000922 Estructura electromecánica para movilidad pediátrica.
A basic model of Alice can be constructed with a material budget of ~1,500 EUR.
Her User Validation
Alice has successfully been deployed with patients exhibiting different medical conditions and covering a diversity of socio-economic backgrounds primarily in Monterrey, México.
Over 12 pediatric subjects have participated in short-term clinical usage which has pointed towards potential benefits in psychological factors as well as to potential positive impacts on blood circulation and internal organ functioning.
Conditions exhibited by users included Muscular Dystrophy (MD), Cerebral Palsy (CP), Spinal Muscular Atrophy (SMA), and Cephalic Disorder (CD).










The Program
Through our Alice Open Source Exoskeleton Program, makers, graduate students and undergraduate students build their own prototypes and improve on their technology-development skills while collaborating with international universities.
Current participants of the program include students and engineers from universities ranging from Latin América all the way to China, England and France.
Become part of our international community; learn, share and build your own exoskeletons to support your local communities !

FOCUSED ON PEDIATRICS
SIMPLIFIED MANUFACTURING

A COLLABORATIVE PLATFORM

Explicación de Jesús Tamez-Duque en español.
Promotional video in English (subtítulos en Español).

























Important: This is an engineering prototype and should be treated as such, and not as a completed commercial product. You can test for size and for visual content purposes, but any and all use with people should be restricted unless directly supported by a clinical partner, as Alice is a complex machine that uses a significant amount of current to activate its actuators. For this reason, our open source files are available to anyone but only upon direct request and under the condition that they demonstrate at least college-level knowledge in engineering and responsibility to make proper use of the machine they will be able to construct. Alice has the objective of getting advanced robotics to everyone, but we recognize our responsibility of making sure we put this technology only on the right hands.
POWERING PARTNERS


ACKNOWLEDGEMENTS
Alice exists because of the passion and effort of outstanding individuals as well as thanks to the support of private and public institutions. We hope that our work honors the time and space we shared.
Santiago Treviño: Promotion and Execution of public and private fund-acquisition strategy + support in pr campaign. initial believer of the initiative. (2016)
Karen Alexandra Acosta: Support in conceptualization and execution of initial mechanical, ergonomic and aesthetic design + development of pr campaign + part manufacturing for the first prototype. (2016 + 2017)
Guillermo Herrera-Arcos: Promotion of the first student effort focused on Alice. integration of the first test-bench prototype. (2017)
Daniel y César @ Tec de Mty: Pro-Bono support and counselling on manual and computer-assisted manufacturing. (2016-2018)
Ing. Pedro Orta: Pro-bono support and counselling on mechanical design and manufacturing techniques + materials. (2016-2018)
OUR SUPPORTERS

















©INDI Ingénierie et Design (2015-2024)
Aix-En Provence, France
